



✓ Adaptation of existing gripping systems
✓ Safe component removal
✓ Precise removal process

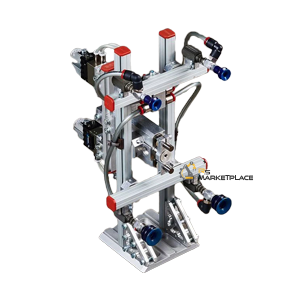
This gripper is designed to remove 4 rubber parts at once.
It uses 4 parallel grippers to grip the rubber parts at the neck, and an additional 4 parallel grippers
to enclose the bellows, preventing over stretching.
a range of grippers with additional functions that can provide enhanced capabilities and improved performance
in industrial automation applications.
These grippers are designed to be highly customizable and can be tailored
to meet the specific requirements of your application.
If you want to improve the performance and efficiency of industrial automation tasks
and can provide significant cost savings over traditional methods.
These grippers are with additional functions are designed to be easy to integrate with different robotic arms,
and can be controlled by different robotic controller platforms.
| Application | Robot Components |
|---|---|
| Type of Gripper | Parallel |
| Country of origin | Germany |
| Country of shipment | Germany |
| Vendor | SP005-0113-AA |
| About Vendor | The company develop and produce innovative gripper components, complete gripper and tailor-made, customized solutions. In addition they also engineer and manufacture intelligent feeding systems and sprue cutting stations. |
| Comments |
You must be logged in to post a review.
Robot Components
This gripper removes finished overloaded components and also
inserts materials such as bushings, sheets, or screws into molds.

Arc Welding
Software
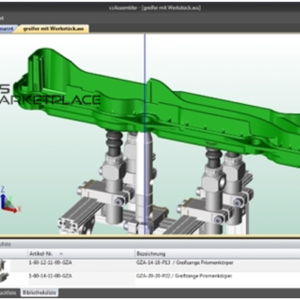
The CAD Grip 2.0 enables interactive configuration of gripper / EOAT systems.
Operating the program is easy and intuitive. Previous knowledge, for example of a CAD system, is not necessary.
CAD Grip is functioning fully independent without usage of any other CAD Software. The user is able, to configure the gripper offline. Software Installation is not necessary. The user receives valuable tips for constructive alternative solutions as he proceeds.
The virtual construction is performed controlled and optimized. The attachment of the matching components takes place automatically. This avoids mistakes in the concept phase already.
When the configuration is completed, the component list can be exported to the Customer Portal and can be ready for instantly placing your order. The project can be saved in the appropriate format for his CAD-Software, as there is Inventor, Autocad, Solidworks, Proengineer or Catia, only to name a few.

Robot Components
This gripper moves a component, such as a glass slide, from one cavity to another.
The gripper can centre itself on the individual cavities and has a separate stroke movement.

Robot Components
This gripper is designed for removing a bumper from a die.
It is equipped with a filling end monitor that allows for monitoring the filling ends on the component,
ensuring a precise and safe removal process.


Robot Spare Parts
The Gripper Conversion Set system is for customers that use suction cups, gripper arms, etc. from alternative brands.
The Gripper Starter Set is ideal for customers that want to delegate the challenging building of End Arm Tooling to experts.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.

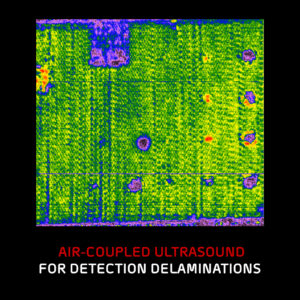
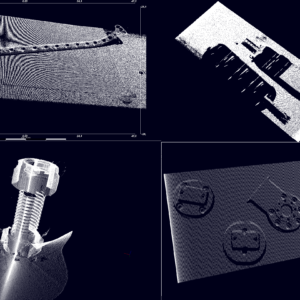
Combination of x-ray and UT imaging
Unlike conventional devices, the integration of imaging technologies on six-axis robotic arms gives a high degree of flexibility in monitoring the complex curvature on both sides of the inspected object, allowing non-destructive testing (NDT) to be expanded and improved. Robots allow to scan a sample with the use of X-ray from a different perspective to locate defects more easily, quickly, and better.
One of the major advantages is that the system can be moved to the object to be inspected. This is in sharp contrast to common industrial CT systems where the sample has to fit inside. Our machine can get to the sample.
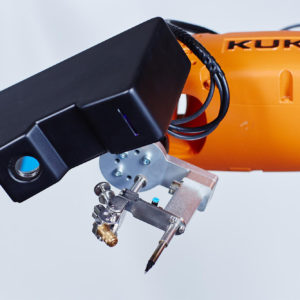
3D Vision System positioning robot in space
This 3D Vision System is an eye for the robot. The advanced optical system, positioning and scanning algorithms allow for the offset of production processes and visual inspection of items. The robot arm with vision system scans the workspace and finds the items that are needed according to the models, and can also perform other activities on it – packing, pick & place, soldering, assembly.

Robot Components
KUKA linear units are translational motion units Linear units can be used to extend a robot?s work envelope or alternatively to move workpieces or tools within the work envelopes of a number of robots. This allows applications such as the tending of more than one machine or fixture, order picking from rows of pallets, or work on very large components. Control of the linear unit is integrated as a mathematically coupled axis in the robot controller, dispensing with the need for an additional controller.




Reviews
There are no reviews yet.