





✓ Adaptation of existing gripping systems
✓ Safe component removal
✓ Precise removal process

Multiple-removal gripper is a revolutionary solution for efficient and precise part removal in industrial automation applications.
This gripper is designed to be lightweight, durable and customizable,
making it ideal for a wide range of applications.
This gripper is designed to remove 32 razor blade covers at once.
It uses tubular gripper profiles and has the advantage of several suction pads that can
be connected to one vacuum source.
Multiple-part removal: The gripper is designed to remove multiple parts at once,
making it ideal for high-volume production lines.
Customizable design: The AGS Multiple-removal gripper can be customized to fit a wide range of objects
and is built to meet the specific requirements of your application.
Lightweight: The gripper is 3D printed using high-strength, lightweight materials,
making it easy to manipulate and reducing the load on the robotic arm.
Durable: The gripper is designed to withstand the rigors of industrial environments
and provide long-lasting performance.
| Application | Robot Components |
|---|---|
| Country of origin | Germany |
| Country of shipment | Germany |
| Vendor | SP005-0113-AA |
| About Vendor | The company develop and produce innovative gripper components, complete gripper and tailor-made, customized solutions. In addition they also engineer and manufacture intelligent feeding systems and sprue cutting stations. |
| Comments |
You must be logged in to post a review.
Robot Components
Our removal gripper safely removes plastic parts or workpieces from injection molding machines.
The parts are usually deposited on a conveyor belt or in a container.


Robot Components
The kit was developed out of years of experience in gripper construction. The concept is to assemble the components in perpendicular orientation whenever possible and make only the active element, such as the vacuum cups, the sprue gripper or gripper finger freely adjustable. All channel nut components are compatible.
Advantages:
• Without channel nut
• High stiffness
• Components can be added at any place
• Only one tool required
• 90 degree orientation
It is a “building set” consisting of 2.500 parts. It will be assembled according to the customers needs.

Robot Components
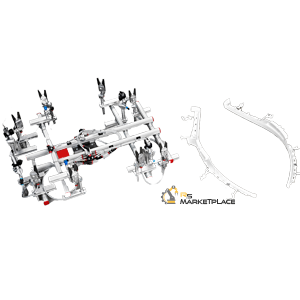
This gripper is designed for removing a bumper from a die.
It is equipped with a filling end monitor that allows for monitoring the filling ends on the component,
ensuring a precise and safe removal process.

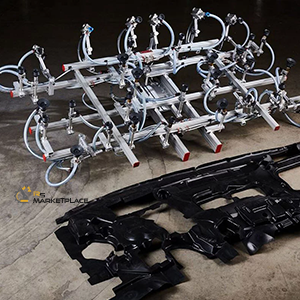
These grippers are specially developed using the 3D printing process.
They have internal vacuum generation capabilities and can be customized to suit specific needs.
Customizable design: The grippers can be 3D printed to fit a wide range of objects
and are customizable to meet the specific requirements of your application.
Lightweight: The grippers are 3D printed using high-strength, lightweight materials,
making them easy to manipulate and reducing the load on the robotic arm.
Durable: The grippers are designed to withstand the rigors of industrial environments
and provide long-lasting performance.
Cost-effective: 3D printing technology allows for faster production and lower costs
compared to traditional manufacturing methods.
With their advanced design and 3D printing technology, the grippers offer a cost-effective
and customizable solution for robotic grasping and manipulation.
Robot Components
Our standard gripper construction kit, which is based on the well-known Channel Nut clamping profile 25/25 and includes
components that are compatible with systems using clamping diameters of 10, 14, 20, and 30mm.
We offer over 2500 different components that have been developed based on practical experience and our own gripper construction expertise.


Robot Components
The company is ready to build the complete gripper, either using the components out of our two systems (PreciGrip or channel nut) or by doing the construction additive, with laser welding technology. Two kinds of documentation are available. A simplified version or the DIN documentation, containing electric / pneumatic diagrams and the declaration of conformity.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.

Robot Components
KUKA linear units are translational motion units Linear units can be used to extend a robot?s work envelope or alternatively to move workpieces or tools within the work envelopes of a number of robots. This allows applications such as the tending of more than one machine or fixture, order picking from rows of pallets, or work on very large components. Control of the linear unit is integrated as a mathematically coupled axis in the robot controller, dispensing with the need for an additional controller.




Reviews
There are no reviews yet.