



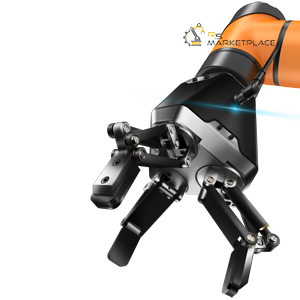
Some key features:
• Gripping force (per jaw): 15-300 N
• Stroke: 37-60 mm
• Recommended workpiece weight: 1-6 kg
• Opening/closing time: 0.6 – 0.8 s
• Repeat accuracy: ± 0.03 mm
• Noise emission: <50 dB
• Driving method: Precise planetary gears + Rack and pinion
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 67
*Parameters depend on the exact model
| Type of product | EOAT/Gripper |
|---|---|
| Type of Operation | Electric |
| Type of Gripper | Parallel |
| Number of Jaws | 2-Jaw |
| Strength (N) | 100-500 N |
| Stroke per Finger (mm) | From20-60 |
| Type of Robot | Cobot |
| Country of origin | China |
| About Vendor | The vendor is a leading high-tech company which leverages cutting edge technology to innovate in the field of industrial intelligent manufacturing. Their core focus has lead them to develop superior precision force control direct drive technology. Bringing this valuable experience to their customers from all industries, they are able to successfully provide electric grippers and precision motion products with the purpose of improving production efficiency and reducing production costs for those around the globe. By doing this, they empower customers to reach their goal of intelligent manufacturing on a large scale. |
| Comments | Certification: CE, FCC, RoHS |
You must be logged in to post a review.


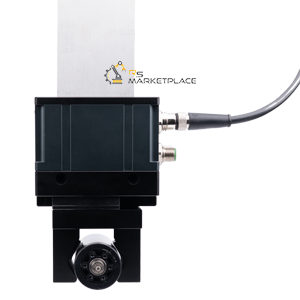
Some key features:
• Gripping force (per jaw): 0.8-100 N
• Stroke: 10-26 mm
• Recommended workpiece weight: 0.05-2 kg
• Opening/closing time: 0.15-0.5 s
• Repeat accuracy: ± 0.02 mm
• Noise emission 40-60 dB
• Driving method: Rack and pinion + Cross roller guide / Precise planetary gears + Rack and pinion Working environment
• Communication interface: Standard: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 40
*Parameters depend on the exact model


Assembly
Some key features:
• Gripping force (per jaw): 3-100 N
• Stroke: 10 mm
• Recommended workpiece weight: 0.1-1.5 kg
• Opening/closing time: 0.2 – 0.5 s
• Repeat accuracy: ± 0.03 mm
• Noise emission: <50 dB
• Driving method: Precise planetary gear reducer + Rack and pinion
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 67
*Parameters depend on the exact model


Some key features:
• Gripping force (per jaw): 3.5-5 N
• Stroke: 5 mm
• Recommended workpiece weight: 0.05 kg
• Opening/closing time: 0.03 s
• Repeat accuracy: ± 0.01 mm
• Noise emission: <50 dB
• Driving method: Electromagnet + Spring
• Communication interface: Digital I/O Rated Voltage: 24 V DC ± 10% IP Class IP 40
*Parameters depend on the exact model

Some key features:
• Gripping force (per jaw): 10-160 N
• Stroke: 95-145 mm
• Recommended workpiece weight: 1.8-3 kg
• Opening/closing time: 0.7 s
• Repeat accuracy: ± 0.03 mm
• Noise emission: <50 dB
• Driving method: Screw drive + Linkage system
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 54
*Parameters depend on the exact model

Some key features:
• Gripping force (per jaw): 40-140 N
• Stroke: 80 mm
• Recommended workpiece weight: 3 kg
• Opening/closing time: 0.7 s
• Repeat accuracy: ± 0.03 mm
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 54
*Parameters depend on the exact model


Some key features:
• Gripping force (per jaw): 10-100 N
• Stroke: 12-30 mm
• Recommended workpiece weight: 0.5-1.5 kg
• Opening/closing time: 0.55-0.7 s
• Repeat accuracy: ± 0.02 mm
• Working environment Communication interface: Standard: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 40
*Parameters depend on the exact model

Assembly
The soft-robot performance allows productions processes that require precision, force application and sensitive handling.

The KR 10 R1100 sixx is designed for a rated payload of 5 kg in order to optimize the dynamic performance of the robot. With reduced load center distances, higher loads up to the maximum payload may be used.


Material Handling
The KUKA 30-3 is a light-payload industrial robot mainly used for arc welding and material removal applications.


Assembly
The UR6 is a lightweight, adaptable collaborative industrial robot that tackles medium-duty applications with ultimate flexibility. The robot is designed for seamless integration into a wide range of applications.


Material Handling
This industrial robot?is a top performer in its class due to its high flexibility and long reach with optimal payload capacity.




Reviews
There are no reviews yet.