






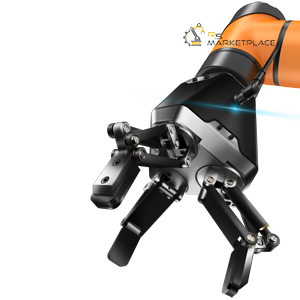
Some key features:
• Gripping force (per jaw): 40-140 N
• Stroke: 80 mm
• Recommended workpiece weight: 3 kg
• Opening/closing time: 0.7 s
• Repeat accuracy: ± 0.03 mm
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 54
*Parameters depend on the exact model
| Type of product | EOAT/Gripper |
|---|---|
| Type of Operation | Electric |
| Type of Gripper | Parallel |
| Number of Jaws | 2-Jaw |
| Strength (N) | 100-500 N |
| Type of Robot | Cobot |
| About Vendor | The vendor is a leading high-tech company which leverages cutting edge technology to innovate in the field of industrial intelligent manufacturing. Their core focus has lead them to develop superior precision force control direct drive technology. Bringing this valuable experience to their customers from all industries, they are able to successfully provide electric grippers and precision motion products with the purpose of improving production efficiency and reducing production costs for those around the globe. By doing this, they empower customers to reach their goal of intelligent manufacturing on a large scale. |
| Comments | Certification: CE, FCC, RoHS |
You must be logged in to post a review.


Some key features:
• Gripping force (per jaw): 10-100 N
• Stroke: 12-30 mm
• Recommended workpiece weight: 0.5-1.5 kg
• Opening/closing time: 0.55-0.7 s
• Repeat accuracy: ± 0.02 mm
• Working environment Communication interface: Standard: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 40
*Parameters depend on the exact model


Assembly
Some key features:
• Gripping force (per jaw): 3-100 N
• Stroke: 10 mm
• Recommended workpiece weight: 0.1-1.5 kg
• Opening/closing time: 0.2 – 0.5 s
• Repeat accuracy: ± 0.03 mm
• Noise emission: <50 dB
• Driving method: Precise planetary gear reducer + Rack and pinion
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 67
*Parameters depend on the exact model


Some key features:
• Gripping force (per jaw): 0.8-100 N
• Stroke: 10-26 mm
• Recommended workpiece weight: 0.05-2 kg
• Opening/closing time: 0.15-0.5 s
• Repeat accuracy: ± 0.02 mm
• Noise emission 40-60 dB
• Driving method: Rack and pinion + Cross roller guide / Precise planetary gears + Rack and pinion Working environment
• Communication interface: Standard: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 40
*Parameters depend on the exact model


Some key features:
• Gripping force (per jaw): 15-300 N
• Stroke: 37-60 mm
• Recommended workpiece weight: 1-6 kg
• Opening/closing time: 0.6 – 0.8 s
• Repeat accuracy: ± 0.03 mm
• Noise emission: <50 dB
• Driving method: Precise planetary gears + Rack and pinion
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 67
*Parameters depend on the exact model


Some key features:
• Gripping force (per jaw): 3.5-5 N
• Stroke: 5 mm
• Recommended workpiece weight: 0.05 kg
• Opening/closing time: 0.03 s
• Repeat accuracy: ± 0.01 mm
• Noise emission: <50 dB
• Driving method: Electromagnet + Spring
• Communication interface: Digital I/O Rated Voltage: 24 V DC ± 10% IP Class IP 40
*Parameters depend on the exact model

Some key features:
• Gripping force (per jaw): 10-160 N
• Stroke: 95-145 mm
• Recommended workpiece weight: 1.8-3 kg
• Opening/closing time: 0.7 s
• Repeat accuracy: ± 0.03 mm
• Noise emission: <50 dB
• Driving method: Screw drive + Linkage system
• Communication interface: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT Rated Voltage: 24 V DC ± 10% IP Class IP 54
*Parameters depend on the exact model


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.


Material Handling
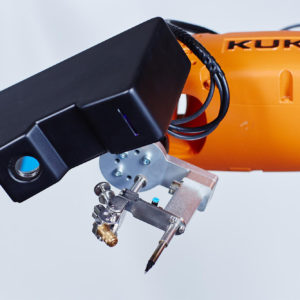
The kit was developed out of years of experience in gripper construction. The concept is to assemble the components in perpendicular orientation whenever possible and make only the active element, such as the vacuum cups, the sprue gripper or gripper finger freely adjustable. All channel nut components are compatible.
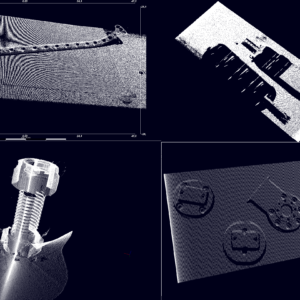
3D Vision System positioning robot in space
This 3D Vision System is an eye for the robot. The advanced optical system, positioning and scanning algorithms allow for the offset of production processes and visual inspection of items. The robot arm with vision system scans the workspace and finds the items that are needed according to the models, and can also perform other activities on it – packing, pick & place, soldering, assembly.


Robot Components
The kit was developed out of years of experience in gripper construction. The concept is to assemble the components in perpendicular orientation whenever possible and make only the active element, such as the vacuum cups, the sprue gripper or gripper finger freely adjustable. All channel nut components are compatible.
Advantages:
• Without channel nut
• High stiffness
• Components can be added at any place
• Only one tool required
• 90 degree orientation
It is a “building set” consisting of 2.500 parts. It will be assembled according to the customers needs.




Reviews
There are no reviews yet.