











• The item is an accessory that can quickly change capabilities
• The item contains 2 types of grippers that are fixed together
(for the European market), with a fast finger change base.
• Lighter gripper with higher grip force.
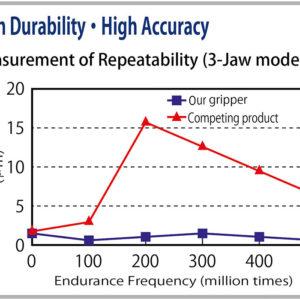
• Endurance time (500 millions cycle).
• High accuracy.
• Easy maintenance.
Grippers made for the following industries:
Machinery, Handling, Aluminium, Steel, Metal components, High precisive manufacturing.

*Starting price with gripper included:
Close Force: 1810 N
Open Force: 1930 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass : 1.29 kg
Air Consumption per reciprocating : 112 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃
| Type of service | EOAT/Gripper |
|---|---|
| Type of Operation | Pneumatic |
| Type of Gripper | Parallel |
| Strength (N) | 501-2000 N |
| Number of Jaws | 8-Jaw |
| Type of product | EOAT/Gripper |
| Country of origin | Japan |
| Country of shipment | UK |
| Vendor ID | SP013-0157-KG |
| About Vendor | The company has built a solid reputation by striving to provide high technology in the manufacturing Industry since its creation in the 1910's. The company is building grippers of high standard quality. It is seeking to build EOAT as light as possible with a greater gripping force. Excellence, high precision and perfection are their core value. |
| Comments | The item contains 2 types of grippers that are fixed together (for the European market), with a fast finger change base. Please look at the 3 designed pictures to understand the insight. This gripper is ideal to save time while exchanging fingers. No tools required while replacing fingers. *can fit for 6-axes industrial robots, designed for linear, gantry robots, Scara robots. - Lighter gripper with higher grip force - Endurance time (500 millions cycle) - High accuracy - Easy maintenance |
You must be logged in to post a review.

Close Force: 600 N
Open Force: 500 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 16.6mm(dia.), 8.3mm(per finger)
Repeatability: ±0.008 mm
Mass: 0.79 kg
Air Consumption per reciprocating : 32 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature : 5 ~ 60 ℃

Close Force: 1000 N
Open Force: 860 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 20.8mm(dia.), 10.4mm(per finger)
Through Hole : 7.8 mm
Repeatability: ±0.008 mm
Mass : 1.25 kg
Air Consumption per reciprocating : 63 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 250 N
Open Force: 280 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 12mm(dia.), 6mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.29 kg
Air Consumption per reciprocating : 8.4 cm3
Air pressure: 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Close Force: 1010 N
Open Force: 1120 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.70 kg
Air Consumption per reciprocating: 50.2 cm3
Air pressure : 0.2 ~0.8 MPa
Operating Temperature : 5 ~ 60 ℃

Close Force: 6400 N
Open Force: 6900 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 32mm(dia.), 16mm(per finger)
Repeatability: ±0.01 mm
Mass : 4.53 kg
Air Consumption per reciprocating : 505.8 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60℃

Close Force: 1010 N
Open Force: 1120 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass : 0.70 kg
Air Consumption per reciprocating : 50.2 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.

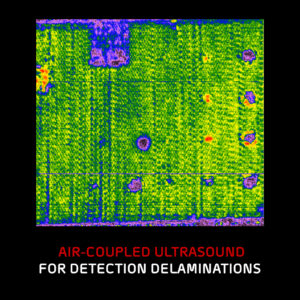
Combination of x-ray and UT imaging
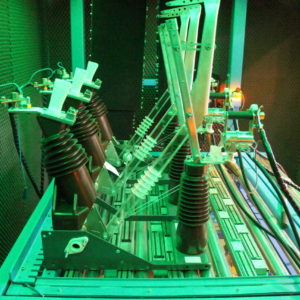
Unlike conventional devices, the integration of imaging technologies on six-axis robotic arms gives a high degree of flexibility in monitoring the complex curvature on both sides of the inspected object, allowing non-destructive testing (NDT) to be expanded and improved. Robots allow to scan a sample with the use of X-ray from a different perspective to locate defects more easily, quickly, and better.
One of the major advantages is that the system can be moved to the object to be inspected. This is in sharp contrast to common industrial CT systems where the sample has to fit inside. Our machine can get to the sample.
Testing & Measuring


Robot Components
The company is ready to build the complete gripper, either using the components out of our two systems (PreciGrip or channel nut) or by doing the construction additive, with laser welding technology. Two kinds of documentation are available. A simplified version or the DIN documentation, containing electric / pneumatic diagrams and the declaration of conformity.




Reviews
There are no reviews yet.