









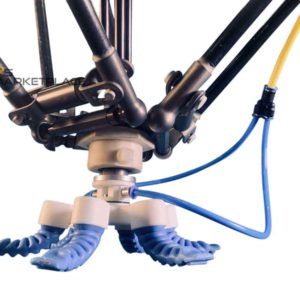
• Our pneumatically driven fingers are made of FDA-approved silicon rubber.
• We guarantee a lifetime of more than 10 million cycles at 1 bar pressure.
• Hygienic designed.
• Easy to use and essentially made for cobots.
Typical gripping tasks:
Chocolates, morsels, chewing gum, screws, batteries.
![]()
Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <300 g
Best for products of rectangular or cubic shape.
| Type of service | EOAT/Gripper |
|---|---|
| Type of Operation | Pneumatic |
| Type of Gripper | Parallel |
| Strength (N) | <100 N |
| Number of Jaws | 2-Jaw |
| Type of product | EOAT/Gripper |
| Country of origin | Germany |
| Country of shipment | Germany |
| Vendor ID | SP013-0139-SG |
| About Vendor | |
| Comments | The pneumatic grippers are soft and light, capable to manipulate all kinds of food, hygienic designed easy to use and essentially made for cobots. Grippers are guaranteed 10 million cycle lifetime. The company can also provide a tailor-made solution for their customers. |
You must be logged in to post a review.

Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <1200 g
Best for products of spherical or cylindrical shape.

Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 40 mm – 120 mm
Weight: <1200 g
Best for products of Rectangular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material:Silicone
Operating Pressure:
-0.5 to 1.0 bar
Grip Force per Finger:
5 N
Durability:> 10 Mio. Cycles: @1.0 bar, 0.5 Hz
The Engineering Kit will help you to do the ideal gripper for high-speed automation.
The kit contains the following :
– 6 soft actuator fingers
(easy to mount, to configurate and to adapt to the component of your choice).
The robot flange also offers holes for all common ISO standards and can be easily mounted with the included tool.
The kit comes in a case with corresponding accessories and pneumatic lines and connections.
The fingers are fixed to the oblong hole plates by means of adapters and can be moved along the plate at any time by loosening the screws to find the optimum distance and orientation.
6 fingers are ideal to grip, food, packaging, medicines or fragile objects in general.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: > 10 Mio. Cycles: @1.0 bar, 0.5 Hz
The Kit includes all elements to assemble 4 different soft grippers.
– 6x Fingers
– 2 Fingers Parallel Base
– 3 Fingers Centric Base
– 4 Fingers Parallel Base
– 6 Fingers Centric Base
– Robot Flange ISO 9409-A50-R
– Robot Flange ISO 9409-A31,5-R
– Spacer
Suction Cup
– Screws, Tools, Pneumatic Accessories
Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.


Robot Components
Sensors and camera system can be attached in your application. The Kit suits multiples systems, e.g.
– Camera mounted with standard components
– Camera bracket with adjustment X-Y
– Combi bracket – camera and light




Reviews
There are no reviews yet.