















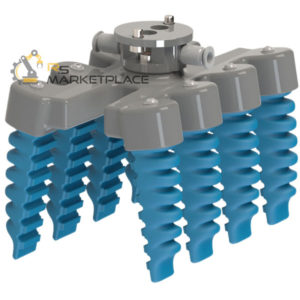
• Our pneumatically driven fingers are made of FDA-approved silicon rubber.
• We guarantee a lifetime of more than 10 million cycles at 1 bar pressure.
• Hygienic designed.
• Easy to use and essentially made for cobots.
Typical gripping tasks:
Dough, rolls, peppers, oranges, cabbage, doughnuts, meat medallions and children’s toys.
![]()
Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <1200 g
Best for products of spherical or cylindrical shape.
| Type of service | EOAT/Gripper |
|---|---|
| Type of Operation | Pneumatic |
| Strength (N) | <100 N |
| Number of Jaws | 6-Jaw, Other |
| Type of product | EOAT/Gripper |
| Country of origin | Germany |
| Country of shipment | Germany |
| Vendor ID | SP013-0139-SG |
| About Vendor | |
| Comments | The pneumatic grippers are soft and light, capable to manipulate all kinds of food, hygienic designed easy to use and essentially made for cobots. Grippers are guaranteed 10 million cycle lifetime. The company can also provide a tailor-made solution for their customers. |
You must be logged in to post a review.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.

Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: > 10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 40 mm – 120 mm
Weight: < 1200 g
Best for products of Rectangular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <300 g
Best for products of rectangular or cubic shape.

Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 40 mm – 120 mm
Weight: <1200 g
Best for products of Rectangular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: > 10 Mio. Cycles: @1.0 bar, 0.5 Hz
The Kit includes all elements to assemble 4 different soft grippers.
– 6x Fingers
– 2 Fingers Parallel Base
– 3 Fingers Centric Base
– 4 Fingers Parallel Base
– 6 Fingers Centric Base
– Robot Flange ISO 9409-A50-R
– Robot Flange ISO 9409-A31,5-R
– Spacer
Suction Cup
– Screws, Tools, Pneumatic Accessories
Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.




Reviews
There are no reviews yet.