






• Lighter gripper with higher grip force.
• Endurance time (500 millions cycle).
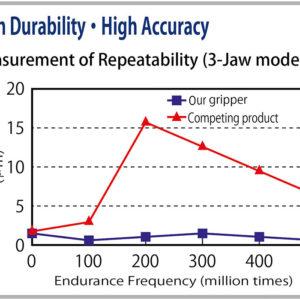
• High accuracy.
• Easy maintenance.
Grippers made for the following industries:
Machinery, Handling, Aluminium, Steel, Metal components, High precisive manufacturing.

Close Force: 600 N
Open Force: 500 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 16.6mm(dia.), 8.3mm(per finger)
Repeatability: ±0.008 mm
Mass: 0.79 kg
Air Consumption per reciprocating : 32 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature : 5 ~ 60 ℃
| Type of service | EOAT/Gripper |
|---|---|
| Type of Operation | Pneumatic |
| Type of Gripper | Parallel |
| Strength (N) | 501-2000 N |
| Number of Jaws | 2-Jaw |
| Type of product | EOAT/Gripper |
| Country of origin | Japan |
| Country of shipment | UK |
| Vendor ID | SP013-0157-KG |
| About Vendor | The company has built a solid reputation by striving to provide high technology in the manufacturing Industry since its creation in the 1910's. The company is building grippers of high standard quality. It is seeking to build EOAT as light as possible with a greater gripping force. Excellence, high precision and perfection are their core value. |
| Comments | *can fit for 6-axes Industrial robots, designed for linear, gantry robots, Scara robots - Lighter gripper with higher grip force - Endurance time (500 millions cycle) - High accuracy - Easy maintenance |
You must be logged in to post a review.

Close Force: 2700 N
Open Force: 2870 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 40mm(dia.), 20mm(per finger)
Repeatability: ±0.01 mm
Mass: 5.14 kg
Air Consumption per reciprocating :
272.2 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Close Force: 1010 N
Open Force: 1120 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.70 kg
Air Consumption per reciprocating: 50.2 cm3
Air pressure : 0.2 ~0.8 MPa
Operating Temperature : 5 ~ 60 ℃

Close Force: 750 N
Open Force: 800 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 12mm(dia.), 6mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.40 kg
Air Consumption per reciprocating : 24.1 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 460 N
Open Force: 490 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.48 kg
Air Consumption per reciprocating: 18.8 cm3
Air pressure: 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Close Force: 1810 N
Open Force: 1930 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass : 1.29 kg
Air Consumption per reciprocating : 112 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 610 N
Open Force: 680 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.78 kg
Air Consumption per reciprocating:
35.1 cm3
Air pressure: 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.


Robot Components
The kit was developed out of years of experience in gripper construction. The concept is to assemble the components in perpendicular orientation whenever possible and make only the active element, such as the vacuum cups, the sprue gripper or gripper finger freely adjustable. All channel nut components are compatible.
Advantages:
• Without channel nut
• High stiffness
• Components can be added at any place
• Only one tool required
• 90 degree orientation
It is a “building set” consisting of 2.500 parts. It will be assembled according to the customers needs.

Robot Components
KUKA linear units are translational motion units Linear units can be used to extend a robot?s work envelope or alternatively to move workpieces or tools within the work envelopes of a number of robots. This allows applications such as the tending of more than one machine or fixture, order picking from rows of pallets, or work on very large components. Control of the linear unit is integrated as a mathematically coupled axis in the robot controller, dispensing with the need for an additional controller.




Reviews
There are no reviews yet.