

Close Force: 1010 N
Open Force: 1120 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.70 kg
Air Consumption per reciprocating: 50.2 cm3
Air pressure : 0.2 ~0.8 MPa
Operating Temperature : 5 ~ 60 ℃

Close Force: 1010 N
Open Force: 1120 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass : 0.70 kg
Air Consumption per reciprocating : 50.2 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃
![110 [mm] electric gripper](https://robotics-solutions.com/wp-content/uploads/2022/10/SP0318x0004_110-mm-electric-gripper-for-cobots-300x300.jpg)
Some key features:
• Payload force fit: 2kg
• Payload form fit: 5kg
• Total stroke: 110 [mm]
• Repetition accuracy: from 0.1 to 0.2 [mm]
• Gripping force: from 3 to 40 [N]
• Gripping speed: from 38 to 127 [mm/s]
• Gripping time: from 0.06 to 0.21 [s]
• Motor: Integrated – electric BLDC
• Dimensions: 213x149x36 [mm]
• Weight: 0.78 kg
What does the package offer:
• Gripper
• Torx key for installation
Extra benefits:
• Can handle fragile parts including plastics, metals and wood.
• Can handle small parts of different sizes and shapes.

Close Force: 1520 N
Open Force: 1690 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 32mm(dia.), 16mm(per finger)
Repeatability: ±0.01 mm
Mass: 2.52 kg
Air Consumption per reciprocating : 8.4 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃
![160 [mm] electric gripper for cobots](https://robotics-solutions.com/wp-content/uploads/2022/10/SP0318x0005-160-mm-electric-gripper-for-cobots-300x300.jpg)
Some key features:
• Payload force fit: 6kg
• Payload form fit: 10kg
• Total stroke: 160 [mm]
• Repetition accuracy: from 0.1 to 0.2 [mm]
• Gripping force: from 25 to 120 [N]
• Gripping speed: from 51 to 160 [mm/s]
• Gripping time: from 0.05 to 0.15 [s]
• Motor: Integrated – electric BLDC
• Dimensions: 262x212x42 [mm]
• Weight: 1.22 kg
What does the package contains:
• Gripper
• Torx key for installation

Close Force: 1810 N
Open Force: 1930 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass: 1.21 kg
Air Consumption per reciprocating : 112 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Close Force: 1810 N
Open Force: 1930 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass : 1.29 kg
Air Consumption per reciprocating : 112 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃
Some key features:
• Payload: 7 kg
• Width: Stroke up to 38 mm
• Speed: Gripping time of 200-300 ms
• Force: 20-140 N
• Standard finger length: 45 mm
• Complete, easy-to-program, collaborative parallel gripper gets to work fast in a wide range of applications
• Easy to deploy in tight spaces and handles even demanding payload requirements
• Get fast ROI with a single flexible, intelligent, and precise gripper that can be easily customized and adapted for many different tasks
• Ready for use almost anywhere, with IP67 rating for harsh environments and ISO Class 5 certification for cleanroom use
What does the package offer:
• Gripper
• Standard fingers
• Silicone fingers sleeves
• Spare bellow
• Torx key

This series of grippers was especially made for high particulate application environments, automotive industry, heavy industry.
The grippers are available in 8 sizes for small lightweight to very large and heavy part gripping. They avoid metal particulates. Particularly reliable due to to its spring assist option that maintains grip in case of air pressure loss.
Some key features:
• Grip force (N): 361-28002
• Variant gripper size and features:
• Gripper-1M :
Stroke mm: 4-8 (0.16-0.32)
Grip Force N: 361-693 – (81-156)
• Gripper-2M:
Stroke mm: 6-12 (0.24-0.47)
Grip Force N: 494 -1006 (111-226)
• Gripper-3M:
Stroke mm: 8-16 (0.31-0.63)
Grip Force N: 854 – 1683 (192-379)
• Gripper-4M:
Stroke mm: 10-20 (0.39 -0.79)
Grip Force N: 1414-2789 (318-628)
• Gripper-5M:
Stroke mm: 13-26 (0.51-1.02)
Grip Force N: 2333-4609 (525-1037)
• Gripper-6M:
Stroke mm: 16-32 (0.63-1.26)
Grip Force N: 4062-8640 (914-1944)
• Gripper-7M:
Stroke mm: 25-50 (0.98-1.97)
Grip Force N: 6404-12542 (1441-2822)
• Gripper-8M:
Stroke mm:35-70 (1.38-2.76)
Grip Force N: 14178-28002 (3190-6300)

This gripper is especially manufactured for use in confined spaces.
Due to the wide range of fitting accessories, the gripper can be used in numerous applications.
The full jaw opening (180°) means that the part can be direct fed, avoiding any release movement by the robot or by the actuator.
Some key features:
• 12 M gripper:
Open Angle: 90° per finger
Grip force N: 32-40 (7.2-9)
• 16 M gripper:
Open Angle: 90° per finger
Grip force N: 70-87 (16-19)
• 20 M gripper:
Open Angle: 90° per finger
Grip force N: 112-141 (25-32)
• 25M gripper:
Open Angle: 90° per finger
Grip force N: 157-199 (35-45)
• 32 M gripper:
Open Angle: 90° per finger
Grip force N: 272-353 (61-79)
• 40 M gripper:
Open Angle: 90° per finger
Grip force N: 446-592 (100-133)
• 50 M gripper:
Open Angle: 90° per finger
Grip force N: 651-893 (146-201)


The product was especially made for confined spaces, combining large opening angle with a high torque. Optional safety springs retain the components, in case of air supply fail or to increase grip force. It is ideal for a large range of options such as pneumatic operation, clamping, seals etc…
These grippers were specially manufactured for heavy duty, extreme high temperature applications.
Some key features:
• Grip force (N): 313-3941
• Variant gripper size and features:
• 62 M:
Opening Angle: 16.8°
Grip Force N: 313-384 (70-86)
• 82 M:
Opening Angle: 15.9°
Grip Force N: 922-1228 (207-276)
• 112 M:
Opening Angle: 19.1°
Grip Force N: 1600-2150 (360-483)
• 142 M:
Opening Angle: 17.6°
Grip Force N: 3941-5775 (886-1298)
• 162 M:
Opening Angle: 17.2°
Grip Force N: 3790-5490 (853-1234)

This series of grippers was especially made for machining and harsh environment, for high vibration and impact applications. It was manufactured for pick-and-place applications. Safety option maintains grip in case of air pressure loss.
Some key features:
• Gripper 25:
Stroke mm: 20 (0.787)
Grip Force N: 474 (106)
• Gripper 45:
Stroke mm: 30 (1.181)
Grip Force N: 481 (108)
• Gripper 65:
Stroke mm: 40 (1.575)
Grip Force N: 796 (179)
• Gripper 85:
Stroke mm: 50 (1.968)
Grip Force N: 1480 (333)
No mounting pattern
• Gripper 105:
Stroke mm: 60 (2.362)
Grip Force N: 2318 (521)
No mounting pattern

Close Force: 250 N
Open Force: 280 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 12mm(dia.), 6mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.29 kg
Air Consumption per reciprocating : 8.4 cm3
Air pressure: 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃
Close Force: 2700 N
Open Force: 2870 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 40mm(dia.), 20mm(per finger)
Repeatability: ±0.01 mm
Mass: 5.14 kg
Air Consumption per reciprocating :
272.2 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Painting
The product is a system composed of a dedicated software and a pair of photoelectric barriers. It is used on a line, and can identify 2D surfaces.
It creates the painting path independently and associates it with a recipe that can be set by an operator. The recipe is based on a series of spraying parameter.
During an initial work phase, recipes are created for each piece, once that’s completed, the only thing left to do is to load the conveyor with the pieces needing to be painted.
The 2D system recognizes the parts, associating them with the corresponding recipe and creates the best painting path.

Some key features:
• Payload force fit:
• Normal grip: 10 kg
• Flexible grip: 8 kg
• Payload form fit: 15 kg
• Grip diameter external: 4 mm(min) – 152 mm (max)
• Grip diameter internal: 35 mm (min)- 176 mm (max)
Gripping force:
• normal grip: 240 [N]
• Flexible grip: 140 [N]
• Gripping force: 100%
• Gripping speed: 125 mm/s
• Gripping time: 500 ms
• Dimensions: 156x158x180 mm
• Weight: 1.15 kg
• TCP: X=0; Y=0; Z=105
• Center of gravity: cX=0;cY=0;cZ=83 mm
• Fingers can be adjusted in 3 different positions
• Possibility to create custom fingers
• Accurate centric positioning drives higher quality, consistency, and output with minimal programming
• Strong, stable grip and 3 contact points makes gripper fast and easy to redeploy for multiple processes
• Accomplish more with customizable fingertips to flexibly grip a wide range of part sizes and shapes
What does the package offer:
• 1 piece of gripper base unit
• 3 pieces standard fingers
• 3 pieces 10 mm. steel fingertips
• 3 pieces 13.5 mm. ruber fingertips
• Torx key
Additional fingertips:
3 pieces Ø 13 mm. steel fingertips
3 pieces Ø 16.5 mm. rubber fingertips


The product was especially made for confined spaces, combining large opening angle with a high torque. Optional safety springs retain the components, in case of air supply fail or to increase grip force. It is ideal for a large range of options such as pneumatic operation, clamping, seals etc…
These grippers were specially manufactured for heavy duty, extreme high temperature applications.
Some key features:
• Grip force (N): 313-3941
• Variant gripper size and features:
• 62 M:
Opening Angle: 16.8°
Grip Force N: 313-384 (70-86)
• 82 M:
Opening Angle: 15.9°
Grip Force N: 922-1228 (207-276)
• 112 M:E67
Opening Angle: 19.1°
Grip Force N: 1600-2150 (360-483)
• 142 M:
Opening Angle: 17.6°
Grip Force N: 3941-5775 (886-1298)
• 162 M:
Opening Angle: 17.2°
Grip Force N: 3790-5490 (853-1234)

Close Force: 3180 N
Open Force: 3400 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 24mm(dia.), 12mm(per finger)
Repeatability: ±0.01 mm
Mass : 2.25 kg
Air Consumption per reciprocating : 201 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature : 5 ~ 60 ℃

Pick & Place
3D applications customized system is a tool intended for:
• Integrators
• Machine builders
• Industrial end-users
This is an ideal tool for any robotic professional that is willing to develop its own 3D vision applications.
Some key features:
Pixels resolution: From 2.3 M to 5 M depending the option
Camera Resolution: From 1920 x 1200 to 2590 x 2048 depending the option
Working extent : From 450 to 2000 mm approx.
Scanning Time: From a minimum of 0.3 Sec to a minimum of 0.8 Sec.
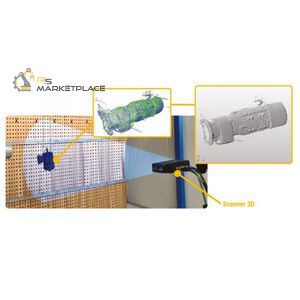

Painting
The 3D Image system is a system consisting of management software and one or more 3D scanners mounted on a line capable of recognizing the size of three-dimensional objects and associating the corresponding painting program.
In a first phase of work the programs for each type of piece are created, after which it is simply necessary to load the supply line with the pieces to be painted.
The 3D image system pro will take care of recognizing the pieces through its 3D scanners and applying the relative painting program.
It recognizes the inclination and position of the pieces and automatically adjusts the painting path.
It can distinguish between objects of different thickness.
It recognizes the real position and adjusts the painting path.

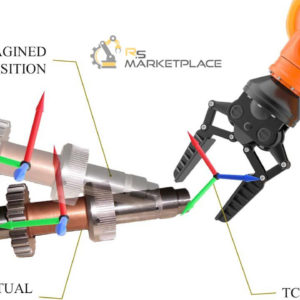
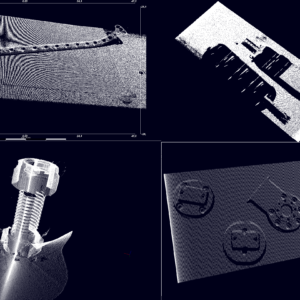
Pick & Place
The software has the ability to transform any camera into a 3D measurement device.
It has the capacity to detect objects and extracts their position and orientation from a single image.
6 numbers are provided for any selected object
• Position X,Y,Z
• Orientation angles A,B,C
Numerous advantages:
• Recognize objects for robots without coding
• Any kind of cameras can be used (webcam, smartphone etc…)
• Uses low cost sensor
• No additional equipment needed
Other advantages:
• Speed:
• No point clouds
• Using NVIDIA GPU can run 30 frame/sec
• Fast object tracking
Flexibility:
• Define objects for robots without coding
• Any camera : WebCam, Industrial even Smartphone
• Working range could be easily adapted
• System setup
Precision:
• RGB camera allows to use different optics
• Getting close to the object allows submillimeter position accuracy
Price:
• Uses low cost sensors
• Can run on a computer with GPU or NVIDIA JATSON
• No additional equipment
• Competitive software pricing


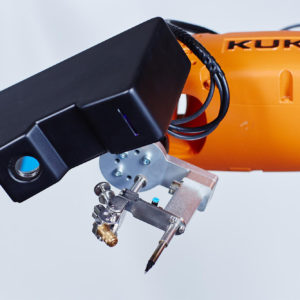
Welding
3D vision guided robot tool benefits:
• Analyzes and identifies randomed items,
• Pinpoints their positions and orientations
• Gives a command to the robot to fulfill a precise task following an automatically generated path.
• With a minimum scanning time of 0.3s, the system reduces the need for fixtures and precise positioning in the manufacturing process
• Can quickly identify the products features and changes.
3D vision guided robot (VGR) can be used for applications including:
Sealing, welding and polishing among others.
The solution is compatible with most of the industrial robots such as:
Kuka, Yaskawa, ABB, Omron etc… including Collaborative robots.
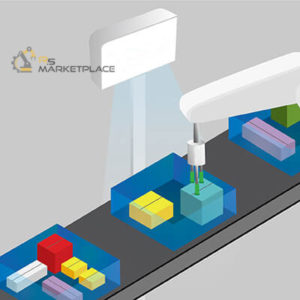

Pick & Place
The 3D vision system offers a multitude of benefits that make it an ideal product for handling a large variety of items stored in warehouses. One of its unique features is the ability to control grippers, ensuring careful picking up of objects. In addition, the system can quickly scan the dimensions of a box, which enables it to identify the best location for an item. The product also has a simple user interface, which makes it easy for users to build several packaging applications without any code writing. What’s more, the solution is compatible with most industrial robots and cobots, including collaborative robots, which makes it an ideal choice for many companies looking to streamline their warehouse processes.


Pick & Place
3D Vision System Pick & Place application benefits:
• The solution is compatible with most of the industrial robots such as Kuka, Yaskawa, ABB, Omron etc… including collaborative robots.
• The product is an AI powered tool that can pick random or unknown objects despite the appearance, spatial location or orientation by using 3D machine vision to generate high quality point clouds.
The 3D vision system contains three distinct but seamlessly integrated hardware and software modules:
• 3D scanner, Image analysis software and Bin collision Avoidance.
• The system is ideal for:
Kitting which means picking different items located in different places, and placing them in a kit.
• Highly recommended for complex patterns
• The 3D vision can recognize and pick individual product from a pile of thin material such as metal, paper, rubber etc..
3D Vision System positioning robot in space
This 3D Vision System is an eye for the robot. The advanced optical system, positioning and scanning algorithms allow for the offset of production processes and visual inspection of items. The robot arm with vision system scans the workspace and finds the items that are needed according to the models, and can also perform other activities on it – packing, pick & place, soldering, assembly.

Close Force: 460 N
Open Force: 490 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.48 kg
Air Consumption per reciprocating: 18.8 cm3
Air pressure: 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 600 N
Open Force: 500 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 16.6mm(dia.), 8.3mm(per finger)
Repeatability: ±0.008 mm
Mass: 0.79 kg
Air Consumption per reciprocating : 32 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature : 5 ~ 60 ℃

Close Force: 610 N
Open Force: 680 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.78 kg
Air Consumption per reciprocating:
35.1 cm3
Air pressure: 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 6400 N
Open Force: 6900 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 32mm(dia.), 16mm(per finger)
Repeatability: ±0.01 mm
Mass : 4.53 kg
Air Consumption per reciprocating : 505.8 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60℃

Close Force: 750 N
Open Force: 800 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 12mm(dia.), 6mm(per finger)
Repeatability: ±0.01 mm
Mass: 0.40 kg
Air Consumption per reciprocating : 24.1 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 850 N
Open Force: 970 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 24mm(dia.), 12mm(per finger)
Repeatability: ±0.01 mm
Mass: 1.34 kg
Air Consumption per reciprocating :
52.4 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 1000 N
Open Force: 860 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 10 mm
Jaw Stroke: 20.8mm(dia.), 10.4mm(per finger)
Through Hole : 7.8 mm
Repeatability: ±0.008 mm
Mass : 1.25 kg
Air Consumption per reciprocating : 63 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

These grippers are specially developed using the 3D printing process.
They have internal vacuum generation capabilities and can be customized to suit specific needs.
Customizable design: The grippers can be 3D printed to fit a wide range of objects
and are customizable to meet the specific requirements of your application.
Lightweight: The grippers are 3D printed using high-strength, lightweight materials,
making them easy to manipulate and reducing the load on the robotic arm.
Durable: The grippers are designed to withstand the rigors of industrial environments
and provide long-lasting performance.
Cost-effective: 3D printing technology allows for faster production and lower costs
compared to traditional manufacturing methods.
With their advanced design and 3D printing technology, the grippers offer a cost-effective
and customizable solution for robotic grasping and manipulation.

Robot Components
Multiple-removal gripper is a revolutionary solution for efficient and precise part removal in industrial automation applications.
This gripper is designed to be lightweight, durable and customizable,
making it ideal for a wide range of applications.
This gripper is designed to remove 32 razor blade covers at once.
It uses tubular gripper profiles and has the advantage of several suction pads that can
be connected to one vacuum source.
Multiple-part removal: The gripper is designed to remove multiple parts at once,
making it ideal for high-volume production lines.
Customizable design: The AGS Multiple-removal gripper can be customized to fit a wide range of objects
and is built to meet the specific requirements of your application.
Lightweight: The gripper is 3D printed using high-strength, lightweight materials,
making it easy to manipulate and reducing the load on the robotic arm.
Durable: The gripper is designed to withstand the rigors of industrial environments
and provide long-lasting performance.


Grinding
Key features:
Weight: 160 Kg
Repeatability: ±0.02mm
Working range:
Axis 1 rotation: -170°/+170°
Axis 2 arm: -85°/+150°
Axis 3 arm: -95°/+170°
Axis 4 wrist: -195°/+195°
Axis 5 bend: -135°/+135°
Axis 6 turn: -360°/+360°

Grinding
Key features:
Weight: 53 Kg
Repeatability: ±0.02mm
Working range:
Axis 1 rotation: -170°/+170°
Axis 2 arm: -100°/+135°
Axis 3 arm: -120°/+156°
Axis 4 wrist: -200°/+200°
Axis 5 bend: -135°/+135°
Axis 6 turn: -360°/+360°

Full System
Handling solution for boards key features:
● Works with any type of material
If you’re in need of an efficient and reliable handling solution for boards of any kinds, look no further! Whether it’s wood, granite, countertops or glass – it doesn’t matter; our product is guaranteed to work with any material. With its unique design, our product ensures that all jobs are accomplished in a safe and secure manner. Thanks to our easy-to-use system, you now have the peace of mind that your goods and materials will be handled appropriately. Get exactly the support you need for your specific projects!
● Robust and easy to use
A handling solution for boards that requires virtually no technical expertise is now available via the user-friendly HMI screen. It’s an extremely robust and easy-to-manage installation process. Thanks to this new technology, it’s possible to implement the board handling solution without having prior knowledge of the systems involved. The intuitive nature of the user interface makes it possible to complete the installation quickly and accurately, setting a new standard for efficient implementation.

Full System
Pallets manufacturing solution key features:
● Nailing of a panel every 30 seconds
Manufacturers can save significant time, effort and cost when it comes to pallet production through the use of an automated solution. This is a great solution for expediting the process of nailing a pallet every 30 seconds. By using such an automated nailing system, the pallet is accurately formed and nailed in one continuous operation, thus dramatically reducing labor costs. The quality of each pallet is also improved significantly as compared to manual production systems without issue of inconsistency or misalignment. Thanks to this pallets manufacturing solution, companies can now create more product with less time and resources.
● The ideal pallets manufacturing solution for your core production is here. This system is ready to meet any type of pallet requirement, regardless of custom formats. Easy to install and use, it offers a reliable solution tailored to your specific needs and processes. With the latest technology, you can trust it will optimize every aspect of your production line. Get the perfect pallet-building solution today.
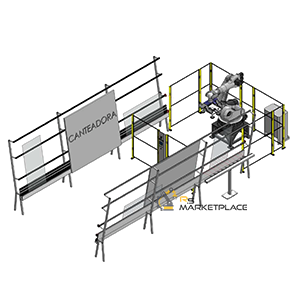
Full System
Handling solution for glass sheets main elements:
● Kuka KR210
The KUKA KR210 6-axis industrial anthropomorphic robot we are utilizing is specially equipped with a high-powered KRC2 controller, ensuring optimal performance. With this system, we can handle products with incredible speed and accuracy. All the necessary sensors and physical stops provide the robot with exact product location coordinates. This allows to automate these processes quickly and precisely in line with the quickening pace of industry workflow demands.
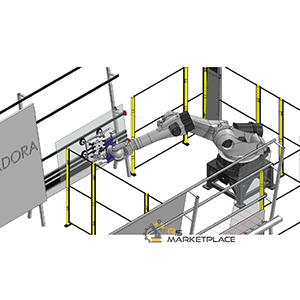
● Clamp tool
The innovative clamp tool is designed and configured to capture and deliver the glass sheets with ease. This machine works by using a system of compression blades that removes the bags from a capture table. These features provide better control over the process ensuring accuracy and reliability for every job that requires material handling. Furthermore, the tools are safe and user-friendly, so any operator can understand how to use them quickly and efficiently. The clamp tool certainly makes the process of moving heavy bags much faster and easier than other manual methods used in logistics and transportation.
● Modular belt conveyor
A handling solution for glass sheets provides the ultimate precision in product handling. Equipped with the necessary stops and defenses to enable optimal gripping, as well as sensors and physical stops to provide the robot with information on positioning of the product, this machinery offers an efficient automated means to move materials quickly and accurately. With its low risk factor and increased safety by computer and technology integration when it comes to manipulating objects, this type of machinery is sure to play a growing role in industrial steps around the globe.


Integration Service
The company implements mobile robots to support the work of the warehouse, transfer of loading to production lines or in the production line. Possibility to manage a fleet of robots.

Full System
Material handling robotic solution in industrial settings has often been a time-consuming and arduous task. Fortunately, the Kuka industrial robot is changing the game for good. With its precision, speed, and adaptability, this automated solution is revolutionizing material handling in numerous industries. It can maneuver bulky parts, organize crates, and load and unload items with ease. This robot not only increases productivity by shortening cycle times but also enhances workplace safety by performing hazardous tasks that human personnel would otherwise have to execute. The Kuka robot sets a new standard for efficient and streamlined material handling.



